
Pour égayer cette fin d’année, la Société Française d’Ecologie (SFE) vous propose le regard d’Alain Thiéry et Cécile Breton, respectivement Professeur des Universités et journaliste, sur le système d’adhésion du gecko des murs.
Ce « regard » est une version un peu modifiée et adaptée pour cette plateforme d’un article des mêmes auteurs paru dans le n°9 d’ESpèces, revue partenaire de la SFE pour ce projet.
MERCI DE PARTICIPER à ces regards et débats sur la biodiversité en postant vos commentaires et questions sur les forums de discussion qui suivent les articles; les auteurs vous répondront.
———
Liaisons faibles et adhésion forte – Le secret du gecko
par Alain Thiéry(1) et Cécile Breton (2)
Article repris du n°9 d’ESpèces et adapté pour cette plateforme par Anne Teyssèdre
(1) Professeur des universités, membre de l’IMBE, UMR-CNRS 7263, Aix-Marseille Université
(2) Rédactrice en chef d’ESpèces
——-
Mots clés : espèces, animaux, comportement, adaptation, évolution, mécanismes, biophysique,
relation Homme-Nature, biomimétique.
——-
Au IVe siècle avant J.-C., Aristote avait observé que certains lézards de la famille des geckos pouvaient monter et descendre le long d’un arbre, y compris la tête en bas. De la fascination pour cette capacité à adhérer à des surfaces plus ou moins lisses est même né un super-héros, Spiderman, qui, sautant de tour en tour en propulsant des fils, peut également monter sur des murs lisses et même des vitres. Avec des ventouses, pensez-vous? Ce n’est en tout cas pas le cas des geckos, ni d’autres animaux «adhésifs» plus récemment étudiés.
Le système d’adhésion du gecko

Vue de dessous d’un gecko marchant sur une vitre (photo A. Thiéry / B. Martin-Garin).
Le gecko des murs ou tarente, Tarentola mauritanica (L., 1758), est un petit reptile insectivore de la famille des Gekkonidae très commun dans le bassin Méditerranéen. Outre le fait de pousser des petits cris la nuit et de déposer des crottes typiques portant un dépôt blanc d’acide urique concentré (cristaux d’acide urique résultant de la réabsorption d’eau par son système rénal, une adaptation aux environnements arides), l’animal se déplace avec agilité sur les parois tant verticales qu’horizontales, la tête en bas. Il possède sous chacun de ses doigts spatulés, non pas des ventouses, mais des lamelles adhésives. [Cette structure existe chez d’autres espèces de Gekkonidae, telle Gecko gecko (L., 1758).]
Si l’on observe une de ces pattes en changeant progressivement d’échelle depuis l’angle macroscopique jusqu’au niveau microscopique (voire nanométrique), nous constatons d’abord que chaque doigt, terminé par une griffe, porte une dizaine de bandes parallèles.
Ce coussinet digital est constitué d’une série de lamelles sèches (nommées scansors), couvertes de fibres souples dites sétules (ou soies), à une densité de 14 400 par millimètre carré (mm2). Composés de kératine associée à des beta-protéines, ces sétules mesurent environ 110 µm de longueur pour 4,2 µm de largeur. Ils se ramifient eux-mêmes en centaines de branches, chacune se terminant par une mince spatule, d’environ 0,2 µm de longueur pour autant de largeur.
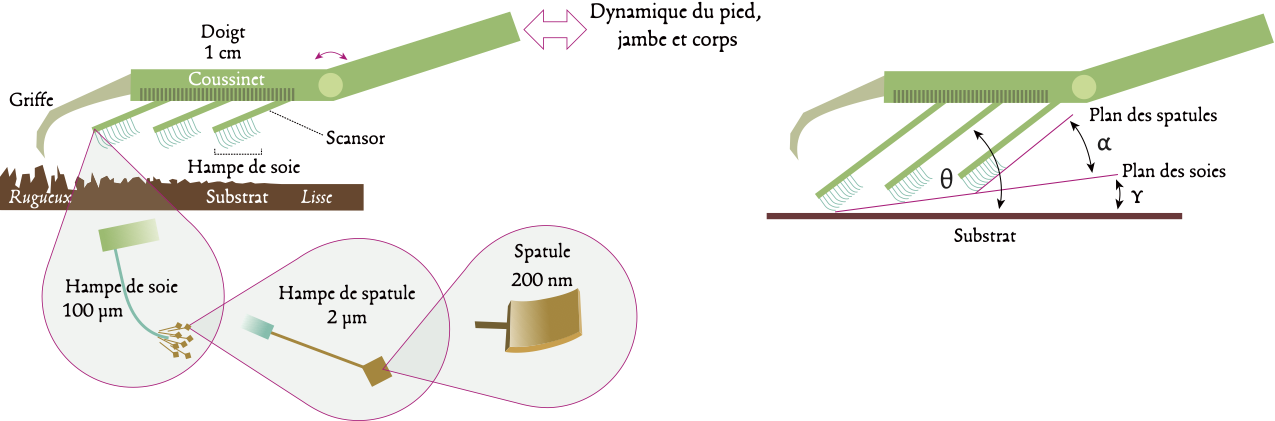
Schéma de la position des structures adhérentes d’un doigt de gecko sur le substrat et position des contacts de ce doigt sur une surface (d’après K. Autumn et alii 2006 et Y. Tian et alii, 2013).

Détail des soies spatulées à leur extrémité en microscopie électronique à balayage (photo A. Thiéry).
Microspatules et forces de van der Waals
Depuis le début des années 2000, les chercheurs de plusieurs universités - Cambridge, Bologne (Italie), Calgary (Canada), Tsinghua (Chine), Akron, Stanford, Massachusetts Institute of Technology et Berkeley (USA), etc. – ont publié près d’une trentaine de travaux sur l’“adhésion gecko”.
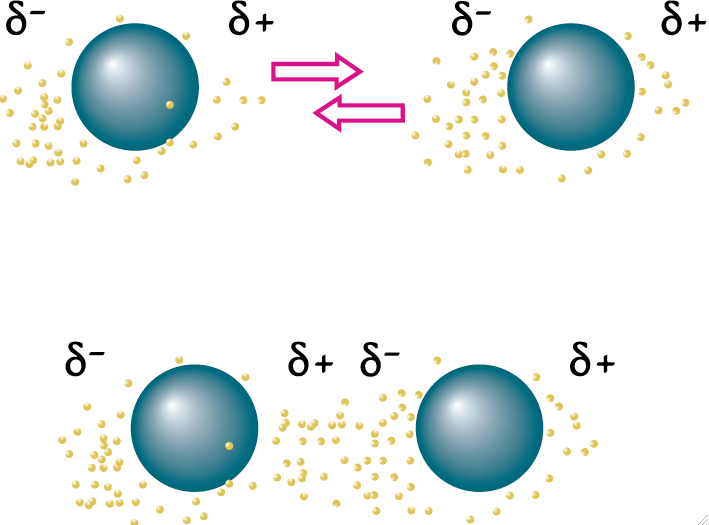
Schéma de l’attraction électrique entre deux atomes (forces de van der Waals)
Comme l’ont montré K. Autumn et A. M. Peattie, ce sont les forces de van der Waals – forces électriques de faible intensité (de l’ordre de 10 nN, soit 0,01 µN) et de très courte portée – aux sites de contact entre l’extrémité des soies et le substrat, qui rendent cette adhésion possible.
L’accumulation des soies sur une surface réduite permet la production d’une force d’attraction importante. Cependant, le problème des forces de van der Waals est qu’elles ne fonctionnent qu’à très petite distance, environ un nanomètre ! Et c’est manifestement le rôle des microscopiques spatules du gecko que d’aller épouser de si près la surface pour que ces forces puissent agir et créer ce type d’adhésion, qualifiée d’adhésion sèche.
Les études de cinématique montrent que les geckos attachent et détachent leurs doigts en quelques millisecondes, un exploit qu’aucun adhésif classique ne peut égaler. En outre, à l’inverse des autres adhésifs, les doigts des geckos ne se dégradent pas et ne se salissent pas.
Chaque sétule, composé d’un millier de spatules, résiste à une force de 200 µN (micronewtons). Des calculs de mécanique théorique, basés sur le potentiel d’interaction entre ces deux plans et la force surfacique d’attraction qui en découle, ont permis de calculer la surface de contact nécessaire entre le plafond et le gecko pour que celui-ci y reste “collé”. À l’équilibre et en appliquant la première loi de Newton, pour un gecko d’une masse de 10 g, on trouve une surface de contact de l’ordre de 5.10‑4 mm2, ce qui est extrêmement petit.

Hémidactyle verruqueux (Hemidactylus turcicus), île de Port-Cros, Var (cliché M. Delaugerre).
[ En rapportant cette surface à celle des spatules (4. 10‑8 mm2), on en déduit que l’adhésion simultanée de 12 000 spatules suffit pour contrebalancer à chaque instant le poids d’un gecko de 10 g marchant au plafond. Un bien petit nombre, relativement aux millions de spatules présentes sous ses doigts!
(Note de l’éditrice) ]
Si l’on se base sur la surface de chaque sétule, on en déduit que la surface réelle de contact entre un sétule et le plafond est de 10-6 mm2. Il suffirait donc, en théorie, de huit spatules sur les milliers que compte chaque sétule pour assurer l’adhésion de 10 mg de “bête”. Avec ses 14 400 sétules par millimètre carré et par patte, dotés chacun de milliers de spatules, les chercheurs ont vérifié que le petit gecko suspendu au plafond peut soutenir tout en marchant une force de 288 N, ce qui correspond – sur Terre – à trois fois son poids.
Pour souligner ce caractère idéal, les ingénieurs ont montré qu’une surface de contact idéalement plane (ce qui est rarement le cas) de 4 mm2 devrait suffire en théorie pour soutenir un homme de 80 kg.
Un système partagé

Vue frontale d’une araignée sauteuse Evarcha arcuata (© L. Jonaitis/Wikipedia commons)
Nous retrouvons ce système d’adhésion temporaire chez des arthropodes, phylum pourtant très éloigné des vertébrés. Chez Evarcha arcuata (Clerck, 1758) par exemple, petites araignées sauteuses de la famille des Salticidae. Comme les geckos, ces araignées sont capables de se mouvoir sur des surfaces lisses et de se tenir tête en bas sans tomber, pouvant même suspendre jusqu’à 173 fois leur poids.
Selon les travaux d’A. Martin et A. B. Kesel, biomécaniciens de l’institut de zoologie, techniques biologiques et de bionique de Saarland (Allemagne), qui ont examiné sous microscope électronique à balayage les pattes de cette petite araignée sauteuse, chacune des faces ventrales des tarses est recouverte d’une multitude de petites soies (environ 78 000 par patte) d’un diamètre de l’ordre du micromètre. Pour d’autres espèces de la même famille, on en compte plusieurs centaines de milliers, voire un million par patte.
Ces soies minuscules composées de chitine (polymère de N-acétyl glucosamine), constituant habituel des téguments et soies des arthropodes, assurent l’adhérence de l’animal sur les surfaces les plus lisses.

Clytus arietis (© Siga/Wikipedia commons )
Ce mécanisme d’adhésion sèche, assuré par des bouquets de soies chitineuses, a également été étudié en 2006 par Federle sur Clytus arietis (L., 1758), le clyte bélier. Cet insecte xylophage, coléoptère de la famille des Longicornes, est surnommé en France “fausse guêpe” en référence à sa livrée rayée de jaune et noir (mimétisme batésien*).
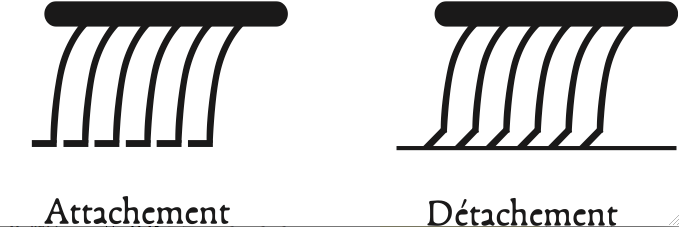
Orientation des soies de Clytus arietis
selon l’attachement et le détachement
(d’après Federle, 2006).
Le fait de retrouver ce système d’adhésion sèche chez deux phylums très éloignés, vertébrés et arthropodes, pose la question de l’origine de cette structure. S’agit-il d’une convergence évolutive*, ou de séquences d’ADN conservées depuis un même ancêtre commun ? (1)
(1) Cette question est abordée dans le forum de discussion (Note de l’éditrice).
Un adhésif inspiré par le gecko
L’observation de ce système d’adhésion sèche a donné aux biophysiciens l’idée de créer des adhésifs inusables sans recours à la colle – qui sèche et se salit –, mais avec de très fines et nombreuses microlamelles. On pourrait imaginer des Post-It® réutilisables à l’infini. Plusieurs groupes industriels dans le monde ont déjà créé de tels matériaux, comme à l’université de Kiel ou encore au Gecko Lab de Kellar Autumn, l’un des chercheurs qui a le plus travaillé sur le sujet, comme en témoignent ses nombreuses publications.
Les chercheurs de BAE Systems, utilisant une technique photolithographique (gravure de motifs en trois dimensions à l’aide de la lumière), ont synthétisé des films à base de polyimide*. Ces tiges de polyimide présentent des extrémités évasées – ressemblant fortement aux têtes en spatule des poils des geckos –, atteignant 100 nm de diamètre et collant à presque toutes les surfaces, même si elles sont sales.
Malgré ses bonnes performances (un mètre carré de ce film devrait suffire à coller un éléphant au plafond), ce matériau n’égale pas encore les pattes du gecko. En effet, le lézard pouvant s’attacher et se détacher d’une surface plus de quinze fois par seconde, la façon dont il contrôle son adhésion reste encore à comprendre pour pouvoir la reproduire. Parmi les applications envisagées, on note des pièces de réparation pour des structures perforées (par exemple des réservoirs de carburant ou des revêtements d’avions), des panneaux d’accès sans attache ou même la fixation rapide de panneaux de blindage.
Des chercheurs de l’université d’Akron (Ohio, USA) fabriquent des adhésifs “gecko-inspirés” autonettoyants, composés de nanoparticules de carbone de 200-500 µm de long, synthétisés à 750 °C à base d’éthylène et d’hydrogène. L’idée de créer des gants adhérant aux surfaces lisses a également germé et des chercheurs américains de l’UMass Amherst ont créé des “gants geckos” (Geckskin’s adhesive pads) à base de polydiméthylsiloxane. Il s’agit de sortes de peaux adhésives sèches, robustes, bon marché et résistantes dans le temps. Selon les calculs, de tels gants seraient capables de permettre à un homme de 80 kg de se hisser sur une surface vitrée sans risque de chute. Des prototypes sont à l’essai à l’université Cornell, tels ces gants utilisés dans le film Mission Impossible 4. Petit clin d’œil : ces gants sont serrés au niveau du poignet par des Velcro®, structure également issue de la bionique, mais c’est une autre histoire…
Des robots et des pansements
Un ingénieur mécanicien, Mark Cutkosky (Nova), a créé un “robot gecko” qui, grâce à des pads en élastomère, grimpe sur les vitrages. Des essais de petits robots (4 cm de long) comme le MechoGecko et le BullGecko conçus par iRobot Corporation®, capables de monter sur différentes surfaces, sont actuellement testés par K. Autumn et ses collaborateurs.
Mais l’une des applications les plus récentes et les plus prometteuses développée par A. Mahdavi et ses collaborateurs en 2008 puis M. F. Yanik en 2009 est la création, à base d’élastomères, de “pansements geckos”, autoadhésifs et biodégradables dont la surface de contact avec la plaie est couverte d’une multitude de micro-piliers synthétiques (1 à 2 µm de hauteur) qui, par l’effet des forces de van der Waals, se collent et se décollent facilement. Des essais sont en cours pour tester leurs propriétés mécaniques, leur adhésion en conditions humides, avec les forces capillaires*, mais aussi leur possibilité de diffuser des drogues, des facteurs de croissance ou des antibiotiques, tout ceci en minimisant le risque de réponses immunitaires et inflammatoires.
Encadré : Une île corse résiste toujours aux tarentes
par Michel Delaugerre, Conservatoire du littoral
Deux espèces de geckos vivent sur l’île de la Giraglia, à l’extrémité nord du Cap Corse : le Phyllodactyle d’Europe (Euleptes europaea) sans doute ici depuis quelques milliers d’années, lorsque l’élévation du niveau marin a fait de ce sommet de colline une île, et la Tarente (ou Gecko des murs, Tarentola mauritanica), probablement arrivée il y a quelques dizaines d’années. Contre toute attente, la dernière venue ne parvient pas à coloniser cette petite île de dix hectares.
La Tarente reste strictement cantonnée à deux murs de ciment, alors que l’espèce native occupe toutes les surfaces rocheuses. Une étude pluridisciplinaire en cours révèle que le substrat rocheux est en cause. La prasinite, roche métamorphique verte, tendre et dont la surface est couverte d’une poudre fine comme du talc, constitue un obstacle physique bloquant l’expansion de la tarente. Des expériences réalisées in situ montrent que cette dernière est incapable d’adhérer à ces parois poudreuses, horizontales ou verticales. Ce “talc” est-il pourvu d’une nanostructure particulière empêchant les forces de van der Walls de s’exercer ou mettant en échec les dispositifs autonettoyants des soies digitales ? Pour quelles raisons ces deux geckos ne sont-ils pas égaux face aux mêmes contraintes de substrat ? Ces questions intéressent vivement la communauté des chercheurs en “gecko-adhésion”. Par delà cette interrogation, cet exemple met en évidence un facteur insoupçonné d’empêchement de la colonisation d’une île par une espèce a priori bien adaptée aux habitats locaux.
Glossaire
Convergence évolutive : Evolution de structures, comportements ou autres adaptations semblables (dites analogues) chez des espèces peu apparentées, confrontées à des pressions de sélection similaires (c-à-d. un même type d’environnement).
[S’oppose aux similitudes de structures, organes et comportements hérités d’un ancêtre commun, dites homologies.]
Forces capillaires : forces de tension superficielle résultant d’interactions qui se produisent aux interfaces entre deux phases en présence : entre deux liquides non miscibles, entre un liquide et l’air ou entre un liquide et une surface solide.
Mimétisme batésien : Sous l’effet de la sélection naturelle, une espèce inoffensive adopte l’apparence physique (motifs, couleurs, etc.) d’espèces nocives. Cela augmente ses chances d’échapper aux prédateurs qui ont appris à éviter les espèces « modèles » nocives.
Polyimide : polymères colorés (souvent ambrés) qui comportent des groupes imides dans leur chaîne principale. Du fait de leur très grande résistance mécanique, chimique et thermique, ils remplacent souvent le verre et des métaux comme l’acier dans des applications industrielles très exigeantes.
Bibliographie
Autumn K. & Peattie A. M., 2002 – Mechanisms of adhesion in geckos. Integrative and Comparative Biology, 42, p. 1081-1090.
Fearing R., Israelachvili J. & Full R. J., 2002 – Evidence for van der Waals adhesion in gecko setae. Proceedings of the National Academy of Sciences of the United States of America, 99, p. 12252-12256.
Geim A. K. et al., 2003 – Microfabricated adhesive mimicking gecko foot-hair. Nature Materials, 2, p. 461-463.
Kesel A. B., Martin A. & Seidl T., 2003 – Adhesion measurements on the attachement devices of the jumping spider Evarcha arcuata. The Journal of Experimental Biology, 206, p. 2733-2738.
Mahdavi A. et al., 2008 – A biodegradable and biocompatible gecko-inspired tissue adhesive. Proceedings of the National Academy of Sciences of the United States of America, 105(7), p. 2307-2312.
Sun W., Neuzil P., Kustandi T. S., Oh S. & Samper V. D., 2005 – The nature of the gecko lizard adhesive force. Biophysical Journal, 89(2), L14-L17.
Yanik M. F., 2009 – Towards gecko-feet-inspired bandages. Trends in Biotechnology, 27(1), p. 1-2.
Pour en savoir plus:
Vidéo du robot “gecko climber” sur You Tube.
Article repris d’ESpèces n°9 et adapté pour cette plateforme par Anne Teyssèdre.
——
Merci beaucoup pour ce regard du nouvel an, qui souligne l’ingéniosité des « inventions de la nature » et l’importance de l’étude du vivant pour les biophysiciens, biomécaniciens et autres scientifiques cherchant des modèles fonctionnels éprouvés!
La question de l’origine évolutive -commune ou non- des systèmes d’adhésion similaires des geckos, araignées sauteuses et autres arthropodes, me semble assez facile à trancher si l’on considère l’éloignement (phylogénétique) des geckos et des arthropodes.
L’hypothèse de l’évolution indépendante et convergente de systèmes d’adhésion sèche similaires au bout des pattes d’animaux terrestres très éloignés au plan systématique (phylogénétique), utilisés pour se hisser (hors de l’eau) le long de parois verticales telles que tiges et rochers, semble a priori s’imposer, car Les derniers ancêtres communs des geckos et des arthropodes terrestres « adhésifs » étaient des animaux (bilatériens) primitifs sans pattes ni squelette, qui vivaient en mer il y a plus de 600 millions d’années (avant la séparation des deutérostomiens et des protostomiens) !
[Bien que similaires au plan physique – c’est-à-dire impliquant tous l’accrochage de très nombreuses micro-soies sur le substrat par des forces de van der Waals -, les différents systèmes d’adhésion étudiés varient largement dans la composition chimique des soies et micro-soies (micro-spatules), à l’image de la diversité biologique des espèces concernées. En particulier, ces soies sont constituées de kératine (protéine caractéristique des vertébrés) pour les geckos, et de diverses sortes de chitine (polymère d’un dérivé azoté du glucose, présent chez les animaux non vertébrés et les champignons) pour les arthropodes. La probabilité pour que les gènes codant ces molécules très différentes aient une origine évolutive commune, différente de celle d’autres gènes structuraux, est quasi nulle. La probabilité pour que la synthèse de ces molécules très différentes soit sous le contrôle de gènes régulateurs « cousins », utilisés par les ancêtres aquatiques communs des vertébrés et arthropodes il y a 600 ou 700 millions d’années, est très faible elle aussi.]
Il me semble donc très probable que l’évolution de mécanismes d’adhésion similaires, impliquant des constituants chimiques bien distincts dans des groupes zoologiques très éloignés, et en réponse à des pressions environnementales comparables (locomotion sur des supports verticaux, en milieu terrestre), reflète une convergence évolutive et non une origine commune. [Cette ressemblance traduit une « analogie » plutôt qu’une « homologie », selon la terminologie d’usage en anatomie comparée.]
Ce qui témoigne de la grande valeur adaptative, pour chaque espèce concernée – et en milieu terrestre – de ce type de mécanisme.
Bien cordialement,
Anne
Bonjour,
Je vais sans doute passer pour un casse-pieds, mais le terme « adhésion » est ici employé à tort.
Les forces d’adhésion sont responsables de l’adhérence. Ce qui crée parfois des problèmes sur les routes est le manque d’adhérence des pneus, non un manque d’adhésion (à une assurance?). En revanche on parle en Physique de forces d’adhésion.
Le problème posé par les Gekkos a été d’identifier les forces d’adhésion responsables de leur étonnante adhérence au substrat. L’anglais courant ne connait pas ces problèmes!
Cordialement,
Jean-Pierre Gasc
Monsieur, Cher collègue,
Votre remarque montre bien l’intérêt que vous avez porté à notre article, qui se veut un exercice de vulgarisation documentée, étant bien précisé que nous ne sommes pas physiciens. Sans rentrer dans une querelle sémantique, signalons qu’effectivement le vocable ‘adhesion’ en anglais signifie à la fois adhésion et adhérence (selon Reverso le portail d’outils linguistiques).
Pour le choix du terme, nous nous sommes basés sur des travaux récents, dont ceux de collègues physiciens: (i) le Dr. José Bico Maître de conférences au laboratoire de ‘Physique et Mécanique des Milieux Hétérogènes’ de ESPCI Paris Tech UMR 7636 CNRS, Université Paris 6 & 7 qui dans sa thèse d’Habilitation à Diriger des Recherches ‘Elasto-capillarité : poils mouillés, Origamis, Cloques’ et dans une de ses conférences ‘du mouillage nul au poils mouillés) à propos des pattes de gecko parle d’adhésion sèche. Page 24: ‘L’extrémité de leurs pattes est en effet recouverte de micro-fibres (seta) qui peuvent adhérer sur tout type de surface…’ (HDR soutenue le 13 juillet 2011); et (ii) le Professeur Liliane Léger (Univ. Paris XI Orsay) qui a présenté une conférence en Mécanique du Solide ‘l’adhésion’, à l’Université de tous les savoirs présentée le 9 juillet 2005.
Nous pensions que le naturaliste avait compris le principe de forces de van der Walls. Merci d’avoir soulevé ce sujet, au demeurant fort intéressant.
AT
Bonjour,
J’aimerais savoir si ce système d’adhésion, par des liaisons van der Waals entre molécules, peut fonctionner également dans l’eau.
Si c’était le cas, est-ce que ce type de mécanisme d’adhésion (ou adhérence) a pu évoluer en milieu aquatique, chez des espèces animales vivant au fond des mers, ou dans les récifs coralliens ?
Merci pour ce « regard » et pour votre réponse,
Arlette
Bonjour Arlette,
Cette question est intéressante car les geckos peuvent monter sur toutes surfaces même humides. Il s’agit alors d’adhésion capillaire où la pression dans le liquide est inférieure à la pression atmosphérique. Le bilan des forces correspond alors à une attraction. Si l’adhésion capillaire résiste à la séparation des deux surfaces, elle n’empêche pas le glissement (intensité dépendant de la viscosité du liquide).
Pour la seconde partie de la question, à notre connaissance il ne semble pas exister beaucoup de données sur ce sujet, à savoir l’existence de ces forces d’adhésion en milieu aquatique.
AT
Cette question de la capacité étonnante de la plupart de gekkos à se déplacer sur des surfaces lisses et en position antigravitaire permet d’élargir l’horizon au-delà de la simple admiration. Hors du milieu aquatique, l’efficacité de la locomotion repose sur le degré d’équivalence entre l’action exercée vers le milieu (poussée ou traction) et la réaction (force extérieure) dont une composante agit sur le centre de masse (composante motrice). Tout se passe alors au niveau de l’interface entre l’organisme et le substrat, où agissent les forces de liaison.
Sans entrer dans le détail, on peut signaler que, parmi ces forces, la gravité et le frottement statique jouent un rôle important. A l’inverse de la force de gravité, la force de frottement statique représente une liaison indépendante de l’échelle et de la pression. Elle est liée à la configuration des surfaces en présence et est définie par un coefficient de frottement qui représente les limites de l’arc-boutement, c’est-à-dire du non dérapage. Certaines molécules ont été aptes à créer des surfaces à fort coefficient de frottement : ce sont des constituants des téguments chez les arthropodes et les vertébrés. Il s’agit de polymères d’origine métabolique et génétique tout à fait différente (aucune homologie), les kératines et les chitines.
Chez les Squamates (ordre de tétrapodes comprenant les lézards, serpents et amphisbènes), la couche externe de l’épiderme est ainsi couverte de petites aspérités, que Paul Maderson associait au processus de la mue chez ces animaux.
Dans plusieurs groupes de sauriens, iguanidés, scincidés et bien entendu chez les gekkoninés (gekkos), la locomotion antigravitaire implique de véritable véritables organes, tels que décrits dans ce « regard » : des lamelles (scansors) portant des milliers de soies très allongées terminées par de multiples spatules capables chacune de bénéficier de forces interatomiques. Il existe une grande diversité de dispositifs, comprenant des muscles et tendons propres à l’érection des lamelles dont l’anatomie fonctionnelle a été décrite par Anthony Russell (1975).
On doit noter que lorsque les gekkos se déplacent en position inversée, les forces d’adhésion équilibrent la gravité et l’animal se déplace alors en utilisant majoritairement ses muscles fléchisseurs (exerçant une traction sur le substrat) pour créer une force externe, et non pas les muscles extenseurs (exerçant une poussée), normalement utilisés contre la gravité depuis la sortie des eaux des tétrapodes.
Bonjour,
Je me permets de reprendre la parole pour signaler l’existence de systèmes d’adhérence apparentés mais un peu différents chez d’autres gekkotidés (gekkos). Prenons par exemple Coleodactylus amazonicus (membre de la sous-famille des Sphérodactylinés), lézard néotropical de très petite taille, ne pesant que quelques centaines de milligrammes. L’animal se déplace dans la litière du sous-bois forestier où il chasse des proies minuscules, collemboles et acariens. Il adopte une marche précautionneuse, le corps nettement soulevé au-dessus du substrat malgré la brièveté des membres. Comme chez les autres gekkos, les autopodes (troisièmes segments des membres, correspondant aux mains et pieds) sont largement appliqués par les faces palmaires et plantaires, à partir desquelles les rayons digitaux (doigts) se disposent en étoile. Par le reploiement des doigts, l’animal peut prendre appui sur le rebord d’une feuille et sauter sur la voisine. Il faut souligner qu’à son échelle, les feuilles de la litière sont immenses.
Un examen en microscopie à balayage a révélé dès 1980 que les surfaces palmaires et plantaires étaient garnies de formations piliformes (en forme de poils), des « soies » de taille variable groupées sur les écailles sous-digitales en touffes, et l’extrémité des doigts garnies de lamelles couvertes de grandes soies terminées en spatule. L’examen complémentaire de la surface des feuilles mortes sur lesquelles se déplace cet animal montre un réseau mycélien (filaments microscopiques de champignons), formant un filet. Malgré sa très faible masse et la position variable dans l’espace des feuilles, ce lézard exerce donc des forces locomotrices sans dérapage grâce à un système qui s’apparente à un engrenage de type « velcro » (Gasc et Renous, 1980).
De façon générale, les gekkos pratiquent une hyperextension des doigts et la dernière phalange est très courte, rejetant dorsalement (c-à-d. vers le haut) la griffe terminale. Chez certains, des structures nouvelles apparaissent, les « paraphalanges », qui soutiennent les lamelles porteuses de soies. Dans la sous-famille des gekkoninés on trouve tous les intermédiaires entre les simples pointes et les soies à division multiple. La phylogénie moléculaire a révélé qu’il s’agissait d’évolution parallèle (Gamble et al., 2012). Deux types se dégagent : dans l’un toutes les phalanges sont couvertes (multiscansorial) comme chez le Gekko tokay, dans le second, seules les dernières phalanges sont couvertes et élargies comme chez le Phyllodactyle. Les études de biomimétique devraient prospecter la diversité des systèmes, car il n’est pas certain que le modèle classique du tokay ou de l’hémidactyle soit optimum ; c’est d’ailleurs ce que suggèrent Gamble et al. (2012).
Bonjour,
La diversité des systèmes d’adhérence/adhésion au substrat des geckos soulignée par Jean-Pierre Gasc me semble mettre en évidence la pluralité des fonctions remplies par ces systèmes, et permet (à mon avis) d’éclairer leur évolution convergente chez les vertébrés et les arthropodes, ainsi que leur spécialisation (voire « exaptation ») chez certaines espèces, mise en évidence par certains changements environnementaux récents.
– L’une des fonctions (probablement la plus ancienne, dans le cas des vertébrés) semble être l’accrochage/arrimage « antigravitaire », aux irrégularités du substrat, de tétrapodes ancestraux grimpeurs mais aussi d’arthropodes terrestres (insectes, scorpions, araignées…), par des griffes, crochets (et soies pour les petits arthropodes) situés à l’extrémité des doigts/pattes locomotrices, ainsi que des lambeaux de mue sous les pattes (pour les squamates) ; [NB: les griffes pouvant évoluer également au service des interactions prédateurs-proies.]
– Une autre fonction, favorisée par la première, est de renforcer l’adhésion de l’animal au substrat en augmentant les surfaces de contact entre l’un et l’autre. L’évolution d’organes « adhésifs » spécialisés avec lamelles, soies, microsoies et microspatules chez les geckos tels que décrits dans ce « regard », et celle de micro-soies (plus simples) chez les arthropodes terrestres (plus légers), impliquant dans les deux cas des structures adhésives à l’échelle microscopique (forces de van der Waals entre molécules de surface), ont vraisemblablement eu lieu au service de cette deuxième fonction.
Sous la pression de la sélection naturelle, le système d’adhésion de certaines espèces (telles que la Tarente) est devenu si efficace qu’il peut fonctionner sur des surfaces verticales très lisses, sans aspérités auxquelles s’arrimer par des griffes ou crochets.
De tels matériaux étaient rares dans la nature, et donc fort peu utilisés par les geckos et autres animaux grimpeurs… jusqu’à la fabrication du verre et des vitres par les humains!
Munies de leur système d’adhésion hyper-efficace, les tarentes évoquées dans ce « regard » se sont adaptées sans problème à l’apparition de (murs), fenêtres et portes vitrées dans leur habitat. Leur capacité à grimper aujourd’hui le long de surfaces verticales lisses (vitres, portes en PCV..) dans les villages méditerranéens peut donc être vue comme une « exaptation »: un avantage actuel ayant évolué dans d’autres conditions de vie…
Cordialement à tous,
Anne
Bonjour,
Je crains qu’un usage trop étendu du concept d’exaptation lui fasse perdre de sa signification. A l’origine, il s’agissait de définir (sans le finalisme de la préadaptation) la capacité d’une structure fonctionnant dans un contexte donné qui ouvre à un groupe un nouvel espace évolutif dans un autre contexte. Le cas typique est celui du système pulmonaire de certains vertébrés leur permettant de surmonter la faiblesse de dilution de l’oxygène dans l’eau en venant capter l’oxygène atmosphérique. Cette capacité présente chez leurs ancêtres a permis aux tétrapodes de se répandre dans les espaces continentaux.
Ici, on est plutôt dans le cas d’une extension opportuniste de la niche. Il n’y a pas d’évolution, pas de conquête d’un nouveau milieu, de même que le martinet noir ne s’est pas trouvé modifié en venant nicher dans les édifices construits par les humains. De plus, je me demande si l’attraction de nos lézards par les surfaces vitrées, ou simplement laquées, n’est pas en relation avec les propriétés réfléchissantes de ces supports qui constituent des pièges à insectes au voisinage des sources artificielles de lumière. Il suffit de voir les rassemblements de ces lézards près des éclairages publics ou privés!
Cordialement,
Jean-Pierre Gasc
Bonjour,
La capacité d’adhésion à tous types de substrats solides (non recouverts de talc, poudre ou poussières) démontrée par les geckos des murs, qui marque leur adaptation à leur habitat terrestre méditerranéen (locomotion verticale sur les rochers, arbres et arbustes), et qui leur permet aujourd’hui de grimper le long des portes et fenêtres vitrées dans les villages, correspond exactement à la définition d’exaptation que vous proposez : « capacité d’une structure fonctionnant dans un contexte donné qui ouvre à un groupe un nouvel espace évolutif dans un autre contexte ».
Toute conquête d’un nouveau milieu, ou utilisation d’éléments nouveaux du milieu, par une espèce en cours d’évolution me semble au plan théorique nécessairement s’accompagner d’un élargissement de niche. Ainsi, lorsqu’ils sont sortis de l’eau, les tout premiers tétrapodes étaient nécessairement capables d’y retourner (pour s’y réhydrater par exemple), et donc d’utiliser leurs poumons primitifs à la fois en milieu aquatique (comme les actuels dipneustes) et en milieu aérien.
Les tarentes me semblent bien parties à la conquête des habitats « anthropisés » méditerranéens, en grimpant notamment aux fenêtres et réverbères qui comme vous le soulignez piègent les insectes dont elles se nourrissent. Leur capacité d’adhésion à ces supports verticaux lisses, inexistants ou très rares hors des habitats humains, a donc une grande valeur adaptative. [Cette exaptation est donc a priori très adaptative pour les tarentes confrontées à la transformation (« anthropisation ») de leur habitat ancestral.]
De façon plus générale, il me semble que l’on peut même considérer l’ensemble des espèces commensales de l’Homme (et non pas les espèces domestiquées) comme « exaptées » aux habitats humains. Face à l’intensité des changements globaux causés dans l’ensemble des habitats par nos sociétés, il semble que la capacité d’adaptation « improvisée » (ou exaptation) de ces espèces aux milieux anthropisés pèsera lourd dans le futur de la biodiversité, à moyen et plus long terme…
Bien cordialement,
Anne
Bonjour,
Par ailleurs, l’incapacité des tarentes à grimper sur les rochers de prasitine recouverts de poudre (« talc ») sur l’île de GIraglia (cf. l’encadré ci-dessus), montre que la locomotion « antigravitaire » de cette espèce dépend aujourd’hui très largement de son système d’adhésion utra-fine (tel que décrit dans ce regard), impliquant des forces de van der Waals entre molécules de surface – Système dont la capacité « d’autonettoyage » est manifestement limitée.
En d’autres termes, à la différence d’autres geckos et éventuels lézards grimpeurs présents sur l’île, les tarentes ne peuvent compter sur leurs seules griffes et autres structures d’accrochage-arrimage « macroscopiques » (c-à-d. de « grande » taille, supérieure au dixième de millimètre par exemple) pour se hisser sur les rochers de prasitine recouverts de poudre – celle-ci inactivant leur système principal d’adhésion ultra-fine.
Ou encore: Il semble que l’évolution du système d’adhésion ultra-fine des tarentes décrit dans ce « regard » se soit accompagnée d’une perte d’efficacité de leur système d’accrochage-arrimage macroscopique (griffes et rugosités digitales), dans leur milieu méditerranéen « pré-humain »…
Cordialement,
Anne
Bonjour
et pardonnez mon intervention tardive dans votre intéressant débat.
Pour le point de vocabulaire: En effet, il s’agit bien d’adhérence – je dois avouer qu’à force lire, de réfléchir et d’écrire en anglais, je ne m’étais pas posé la question.
Je rejoins Anne Teyssèdre en pensant que ces système d’adhérences similaires relèvent très probablement d’une convergence évolutive, s’agissant d’organismes très lointainement apparentés et de structures bien différentes (chitine, kératine).
L’adaptation de certaines espèces à des habitats anthropiques, caractérisés par des substrats lisses (mais aussi par des sources lumineuses et des ressources alimentaires accrues, des micro-habitats favorables à la ponte, sans doute aussi des surfaces favorables à la régulation thermique…) est bien un élargissement de la niche écologique.
Dans le cas des geckos de l’île de la Giraglia, nous retrouvons les deux types évoqués par Jean Pierre Gasc: la tarente « multiscansoriale » avec une surface adhésive importante ET seulement deux griffes fonctionnelles, et le phyllodactyle qui est pourvu de deux petites surfaces adhésives sur la dernière phalange (qu’il est capable de relever pour qu’elles ne soient pas en contact avec le substrat) et cinq griffes fonctionnelles. La capacité de s’agripper et de se mouvoir sur le substrat dépend de la combinaison du potentiel « accrocheur » des griffes (pour les geckos qui en sont pourvus), et des propriétés « adhésives » des soies subdigitales. Sur un substrat inhabituellement poudreux (car dans la nature toutes les roches le sont plus ou moins), les grandes surfaces adhésives et le petit nombre de griffes semblent se révéler très désavantageuses pour la tarente.
L’étude en cours (voir sur ce lien http://delaugerre.fr/rs/2bad42pads01.pdf la petite présentation préparée pour des collègues il y a quelques temps) est menée principalement sur le terrain et ne permet pas de savoir si les deux espèces ont des différentes capacités d’autonettoyage des soies adhésives. De même la dimension des particules du « talc » de prasinite est certes fine (plus que le sable le plus fin), mais plus grossière que des argiles par exemple. Leur taille est-elle en cause? Sans expérimentation en laboratoire plusieurs questions resteront ouvertes.
Bonjour Michel,
et merci pour votre intervention. Votre description comparée des pattes de la Tarente et du Phyllodactyle souligne l’importance très secondaire des griffes pour la première espèce (qui n’en possède que deux par patte), et des surfaces adhésives de ses doigts (petites et rétractables) pour la deuxième, confirmant ainsi l’évolution de deux systèmes d’adhérence au substrat éventuellement complémentaires mais non interchangeables chez les geckos (geckotidés) grimpeurs. [Ces deux systèmes étant l’accrochage « macroscopique » par les griffes, et l’adhésion fine (microscopique, via des forces de van der Waals) par des faisceaux de micro-soies.]
Le fait que les tarentes ne possèdent plus que deux griffes à chaque patte – alors que leurs ancêtres en possédaient cinq, une par doigt – confirme mon hypothèse ci-dessus que le perfectionnement du système d’adhésion fine de cette espèce s’est accompagné de la régression de son système d’accrochage.
Ainsi les deux systèmes peuvent être complémentaires mais ne sont pas équivalents au plan fonctionnel: le système d’adhésion fine de la Tarente l’a prédisposée à grimper aux vitres dans les habitats humains, mais lui interdit l’ascension des roches de prasitine (couvertes de « talc »), tandis que les capacités inverses sont observées chez le Phyllodacte, as de la varappe sur l’île de la Giraglia..